
مسابقة البولينج للروبوتات الذكية
تحدي هندسي وتقني يهدف إلى تصميم وبرمجة روبوت ذاتي التحكم بالكامل، يحاكي مهارات لاعب البولينج المحترف لإسقاط أكبر عدد من الدبابيس ضمن معايير دقيقة.
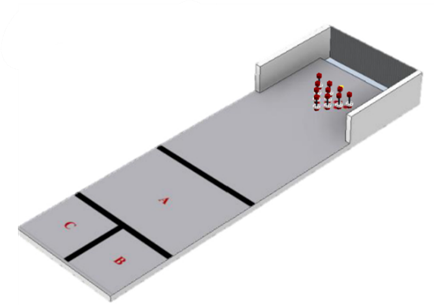
أولاً: مواصفات الميدان والأدوات
- ممر الجري: لوح خشبي أملس بطول 164 سم وعرض 64 سم.
- مناطق التحكم:
- منطقة الإطلاق : (A) طولها 30 سم × العرض 64 سم(يمنع تجاوز خطوطها أثناء الرمي).
- منطقتي البدء (B/C): مربعات بمساحة 20 سم × العرض 20سم (خلف خط الإطلاق).
- الدبابيس (Pins): 10 دبابيس مصنوعة من قطع الليجو (ترتب بالشكل المثلث الكلاسيكي).
- الكرة: كرة Duplo قياسية بقطر 2 بوصة.
ملاحظة: B أو C قد تكون منطقة بدء الروبوت (يتم الإعلان عنها قبل بدء كل إطار).

ثانياً: شروط ومواصفات الروبوت
- الحجم: الأبعاد القصوى عند البدء 20سم طول × 20 سم عرض.
- التمدد: يُسمح للروبوت بالتمدد أثناء العمل لصل إلى 30 سم طول × 30 سم عرض كحد أقصى.
- الارتفاع: لا توجد قيود على الارتفاع.
- التحكم: يجب أن يعمل الروبوت ذاتياً بالكامل. يُمنع لمس الروبوت إلا إذا كان جزء منه داخل منطقة القاعدة (B/C).
- الالتزام: يُسمح بروبوت واحد فقط لكل فريق طوال المنافسة.
إجراءات الفحص وبدء الجولة
يجب أن تخضع جميع الروبوتات لفحص فني دقيق قبل الدخول في المنافسة لضمان الالتزام بالمعايير التالية:
- المعايرة والتحضير
- المعايرة: تُمنح الفرق فرصة معايرة واحدة فقط عند انطلاق المنافسة لضبط الحساسات والمحركات.
- تحديد الموقع: قبل كل إطار (Frame)، يحدد الحكم منطقة البدء (C/ B) ويحدد الاتجاه الأمامي للروبوت.
- تدقيق وضعية الانطلاق
- الإسقاط العمودي: قبل صافرة البداية، يجب التأكد من أن الإسقاط العمودي لهيكل الروبوت يقع بالكامل داخل حدود منطقة البدء المحددة (C/ B).
- آلية اللعب والرمي
- تحميل الكرة: يُسمح للمتسابق بتحميل كرة واحدة فقط في كل مرة.
- التشغيل: ينطلق الروبوت تلقائياً بمجرد بدء المحاولة لإطلاق الكرة من المنطقة (A).
- الرمية الثانية: في حال وجود رمية ثانية في نفس الإطار، يلتزم المتسابق بوضع الروبوت في نفس منطقة البدء وبذات الاتجاه الذي استُخدم في الرمية الأولى.
ثالثاً: نظام اللعب وجولات التنافس
- زمن الجولة : 3 دقائق إجمالية (يتوقف الوقت بين الإطارات).
- هيكلية الجولة: تتكون من 5 إطارات (Frames)، ولكل إطار رميتان كحد أقصى.
- آلية البدء:
- يحدد الحكم منطقة البدء (B او C) واتجاه الروبوت قبل كل إطار.
- يجب ان يكون الروبوت ذاتيا، يمكن للمتسابق لمس الروبوت في منطقة (B او C).
- يقوم المتسابق بتحميل الكرة، وينطلق الروبوت تلقائياً نحو منطقة (A) للإطلاق ولا يحق لمس أي جزء من الروبوت في هذه المنطقة.
- يجب أن يعود الروبوت إلى منطقة البدء بعد كل رمية لاعتماد النقاط.
- يسمح للفريق بالمشاركة بروبوت واحد ولايسمح بالتبديل الي روبوت اخر اثناء المنافسة.
رابعاً: نظام احتساب النقاط
يتم حساب النقاط بشكل تراكمي، مع وجود حالات خاصة كالتالي:
- الضربة القاضية (Strike): إسقاط جميع الدبابيس من الرمية الأولى.
- النتيجة: تُحسب 10 نقاط + مجموع نقاط الإطار التالي.
- التكملة (Spare): إسقاط جميع الدبابيس باستخدام الرميتين.
- النتيجة: تُحسب 10 نقاط + نقاط الرمية الأولى فقط من الإطار التالي.
- الإطار الخامس (الاستثنائي): يحق للروبوت رمية ثالثة إضافية فقط إذا حقق (Strike) أو (Spare) في هذا الإطار. وتنتهي الجولة فورا ولا يحق رمية ثالثة في حالة اذا لم يتم اسقاط الدبابيس العشرة بعد الرميتين الاولي والثانية.
جدول تسجيل الإطارات الخمسة:
|
الإطار (n) |
الرمية الأولى |
الرمية الثانية |
مجموع الإطار التراكمي (TSF) |
|
1 |
X1 |
Y1 |
TSF1 = X1 + Y1 |
|
2 |
X2 |
Y2 |
TSF2 = (X2 + Y2) + TSF1 |
|
3 |
X3 |
Y3 |
TSF3 = (X3 + Y3) + TSF2 |
|
4 |
X4 |
Y5 |
TSF4 = (X4 + Y4) + TSF3 |
|
5 |
X5 |
Y5 |
TSF5 = (X5 + Y5) + TSF4 |
خامساً: مخالفات وقواعد الأخطاء (Fouls)
تُسجل نتيجة الرمية (صفر) في الحالات التالية:
- تجاوز أي جزء من الروبوت للخط الأسود لمنطقة الإطلاق (A) أثناء رمي الكرة.
- ارتطام الكرة بالجوانب (الجدران) قبل إصابة الدبابيس.
- عدم عودة الروبوت إلى إحدى مناطق البدء (B او C) بعد الإطلاق.
- ملاحظة: الدبابيس التي تسقط نتيجة رمية خاطئة تظل مسقطة ولا تُعاد.
سادساً: تحديد الفائز وحسم التعادل
- الفائز هو صاحب أعلى مجموع نقاط تراكمي في نهاية الإطار الخامس.
- حسم التعادل: في حال تساوي النقاط، يفوز الفريق الذي أنهى الجولة في (وقت أقل (صاحب الوقت المتبقي الأكثر